A principled approach to design using high fidelity fluid-structure interaction simulations
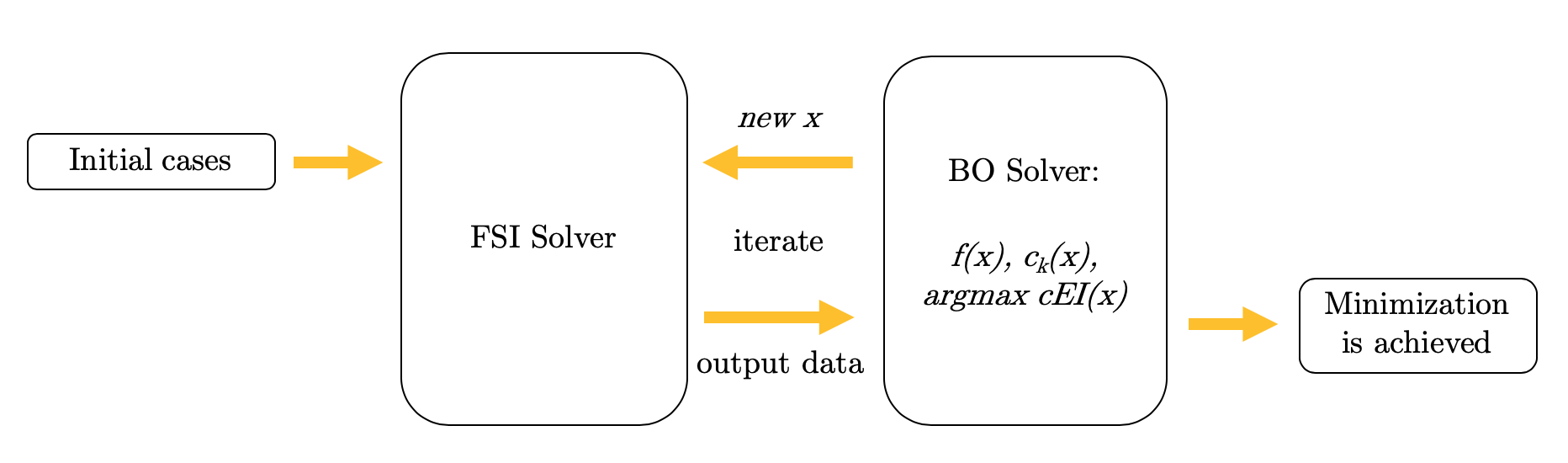
Figure 1: A simple representation of the interplay between the FSI and Bayesian optimization solvers.
The present work explores the use of Bayesian optimization to optimize design
parameters in problems that require expensive fluid-structure interaction (FSI) models.
We first present a series of FSI verification tests on a seleted problem that is close within the
design space of our ultimiate application, to gauge the fidelity of our FSI solver
and gain confidence in the FSI solutions. Subsequenly, we incrementally increase the complexity
of our verification case, through a series of bridge simulations where we bridge FSI simulations with Bayesian optimization,
to bring the verification case closer to the desired application. In our case, we aim to exploit our
bridge simulations to efficiently optimize the design of an underwater, unmmaned, autonomous vehicle (UUAV) sail plane.
Fluid-structure interaction solver:
Bridge simulations:
Composite material properties selection for UUAV:
If you are interested in learning more, feel free to check out the following article for more details:
Wensi Wu, Christophe Bonneville, and Christopher Earls. 2020. "A principled approach to design using high fidelity fluid-structure interaction simulations", In: arXiv:2008.09687.
Implicit partitioned FSI approach is adopted to orchestra the solutions within the FSI system.
An open source structural modeling finite element solver, CU-BENs, is used to model the response
within the structural subdomain. While in the fluid subdomain, an open source computational fluid dynamic package,
OpenFOAM 1.6-ext, is utilized. A coupling library is written to facilitate communications between the two solvers.
Simultaneously, to ensure equilibriums along the fluid-structure boundary are satisfied.
Time step advancement within the FSI system as well as solution convergence are managed
through the IQN-ILS quasi-Newton iteration method.
The canonical problem, Turek & Hron benchmark, is considered in our verification procedure to gauge the accuracy of the FSI solver. The geometric configuration of the Turek & Hron benchmark is similar enough to that of our desired application (i.e. fiber reinforce plastic UUAV sail plane). This makes the benchmark a perfect candidate for our need. The velocity and pressure profiles of the benchmark are shown in the videos below. The tip displacements of the cantilever beam, along with the drag and lift forces act on the beam, are compared against the values reported in the literature. Our results fall well below the acceptable threshold of percentage difference. Hence, we are confident in our FSI predictions.
The canonical problem, Turek & Hron benchmark, is considered in our verification procedure to gauge the accuracy of the FSI solver. The geometric configuration of the Turek & Hron benchmark is similar enough to that of our desired application (i.e. fiber reinforce plastic UUAV sail plane). This makes the benchmark a perfect candidate for our need. The velocity and pressure profiles of the benchmark are shown in the videos below. The tip displacements of the cantilever beam, along with the drag and lift forces act on the beam, are compared against the values reported in the literature. Our results fall well below the acceptable threshold of percentage difference. Hence, we are confident in our FSI predictions.
Video 1: Turek and Hron FSI3 velocity profile.
Video 2: Turek and Hron FSI3 pressure profile.
As a result of the verification test, we have identified suitable spatiotemporal
discretization for the problem of our interests and numerical parameters for our selected
numerical schemes. We extend the canonical verfication model by altering
the engineering properties and perform Bayesian optimization using our bridging simulations.
The elastic modulus of the structure within the canonical verification model
are specified as a function of its cantilevered geometry: as linear, uniform,
and box functions respectively. In the example with linear elastic modulues function,
we minimize the tip displacment of the cantilever beam with outlet velocity constraint;
In the second and third case (uniform elastic modulus function and box function),
we aim to minimize the tip displacement without constraints. For all three cases,
our Bayesian optimizer is able to identify the best design parameters that lead to
a global minimum in the response within dozen of iterations.
With our experience with FSI verification and bridging simulations, we now
turn our attention towards the design optimization of a UUAV sail plane.
The velocity and pressure profiles of the UUAV sail plane simulation are shown
in the videos below. In this problem, we are looking to indentify the optimal
combination of sail plane stiffness and angle of attack that minimizes the drag force,
while imposing conditions on the lift force, the vertical tip displacement, along with
the outlet pressure differential.
Video 3: UUAV sail plane velocity profile.
Video 4: UUAV sail plane pressure profile.
Wensi Wu, Christophe Bonneville, and Christopher Earls. 2020. "A principled approach to design using high fidelity fluid-structure interaction simulations", In: arXiv:2008.09687.